
ժҪ��������sҺλӋ�ڳ�Ʒ�̓�����Ʒ�y���еđ��ØO��V�����@���������܉F(xi��n)���ܭh(hu��n)��Ӱ푵Ĝy����������ܸ߾��ȴ�����sҺλӋ���аl(f��)�ܵ��I(y��)��߶���ҕ�����P�о���̽������ӿ�F(xi��n)�����ڴˣ����Č��OӋһ�N�ܸ߾��ȴ�����sҺλӋ�����@�x�ü��g���OӋĿ�ˡ�Ӳ����ܡ����w·��������(ji��)Ҫ�c���OӋ��(n��i)���M�з������l(f��)�F(xi��n)�������OӋ�܉������Ƅ�ʽ���w��Һλ�ܸ߾��Ȝy�����߂��^���ƏV�rֵ��
�����f����Ч����������sҺλӋ��������Ӽ��g�ֶΌ��F(xi��n)Һ�wҺλ��que�y�����y���^����Ҫ���l(f��)���}�_�ͻز��}�_�g�ĕr�gֵ�_չ����Ӌ�y��������sҺλӋ�܉�һ�w���y���ضȡ�Һλ�Ҳ��ܭh(hu��n)������Ӱ푣��鱣�C�似�g��(y��u)�ݵij�ְl(f��)�]�����DZ��ć��@�ܸ߾��ȴ�����sҺλӋ�_չ�о���ԭ�����ڡ�
1�ܸ߾��ȴ�����sҺλӋ�OӋ
1.1�x�ü��g
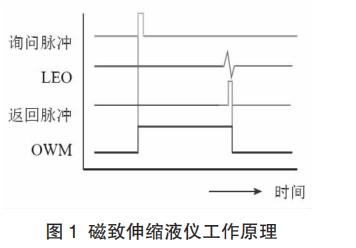
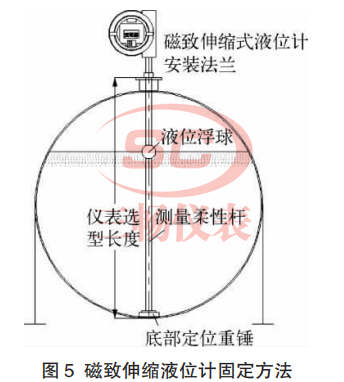
�����о����õĴ�����sҺλ�������߂�߿ɿ��ԡ��߾��ȡ��ײ����ԡ���ȫ�Գ�ɫ���Ԅӻ��̶ȸߵ����c���ڲ����}�_ԭ��֧���£���ʼ�ͽKֹ�}�_�Ĝy���܉��Cλ�����Ĝʴ_�ó�������1mm�ķֱ��ʺ�0.5mm��Ӌ�����ȡ��ڴ��Ը������£�������sҺλ�������܉��|Һλ�B�m(x��)�y�����ڜy���؏��Է���ı��F(xi��n)Ҳ�^���ɫ���o���O�õ�ܛ�ܷⷨ�m���ڷ��m�w���_�ݼy��������sҺλ�������İ��b�;S�o�܉���Ì��F(xi��n)���茢���h(hu��n)����ж�º��M��ܛ�ܷⷨ�m���b���ڷ��m�w�ϔQ�oҺλӋ�����h(hu��n)�����b�������b���������D1�������sҺ�x����ԭ��[1]��
1.2�OӋĿ��
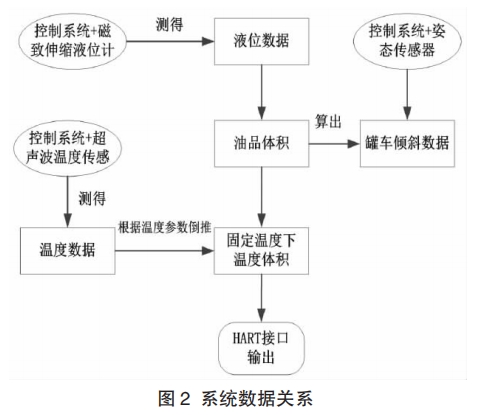
��̎����S3C6410����ܸ߾��ȴ�����sҺλӋ�Ŀ��ƺ��ģ��߾��ȵĕr�g�y�����ڕr�g��(sh��)���D�Q�����F(xi��n)��������sҺλ�y��������ӿ���ɹ�܇Һλ��que�y�������������cԓ�r�g�y�������ĽY�Ͽ�ͬ�r���F(xi��n)���ز��r�g�߾��Ȝy�����Y����Ʒ�w�e�c��܇Һλ���Pϵģ�ͣ���Ʒ�w�e�y���ͬ�r��ɣ��ضȂ�������������Ʒ�w�e�ڹ̶��ض��µķ��ơ������OӋ�漰���ˑB(t��i)������������ڻ����C�ϵ�y(t��ng)�ĸ����ܼ��g�y��ϵ�y(t��ng)���о�ʹ�û�����Ԫ��(sh��)�����S�㷨�����┵(sh��)��(j��)�ںϼ��g�����rݔ����Ư�����S�ˑB(t��i)��λ��(sh��)��(j��)�����w����Ԫ��(sh��)�͚W���DZ�ʾ���Դ˝M���Ƅ�ʽ�ăAб�z�y��Ҫ��ͨ�^�Ԅ�Һλ�a�������ɸ��ʴ_�y��Һλ����õ�HART�ӿ�����ݔ������Y�ψD2��ʾ��ϵ�y(t��ng)��(sh��)��(j��)�Pϵ���̶��ض��µ���Ʒ�w�e�܉��ɴ�����@ȡ�������о��ĺܸ߾��ȴ�����sҺλӋ�����Ƅ�ʽ���w���茍�F(xi��n)��ͬ�ضȲ�ͬ��r�¹�܇��(n��i)��Ʒ�����пɱ��Եĺܸ߾��Ȝy����Һλ�`��w�e�`�������քe������1mm��0.1%��(n��i)[2]��
1.3Ӳ�����
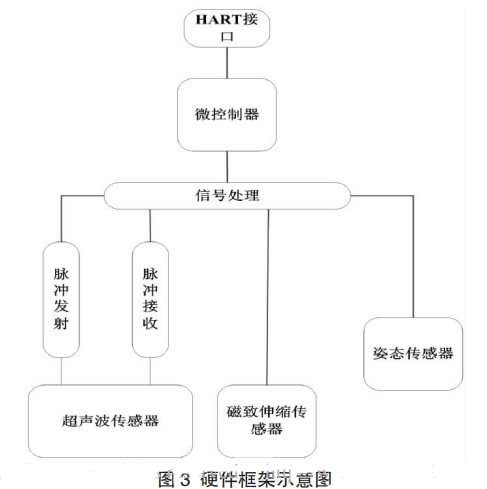
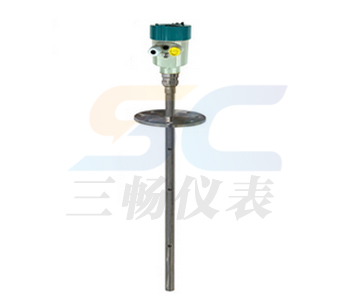
���ڰl(f��)��ԃ���}�_�����շ���Ť�����}�_�ĕr�g�������sҺλ�������Ɍ��F(xi��n)Һλ�߶�Ӌ�㣬Ť�����}�_������ұ����������Օr���z�y����Ť�����}�_�������̖�D�Q��������̖̎��ϵ�y(t��ng)���Ŵ��̎�����M��늉����^��������ȡ��̖�ĕr�̣�늉����^����r�g��(sh��)���D�Q��оƬ�l(f��)�������̖���l(f��)���}�_�ͷ����}�_�g�ĕr�g���ɕr�g��(sh��)���D�Q��оƬ���Ӌ�㣬��(j��ng)�ɴ�������O��ӿڵĕr�g��(sh��)��(j��)��������̎������Һλ��(sh��)��(j��)��������̎����̎����ͨ�^�D�Q���{�ƣ��քe�ɔ�(sh��)����̖HART�f(xi��)�h��ģ�M��4-20mA��̖ݔ�����D3��Ӳ�����ʾ��D��
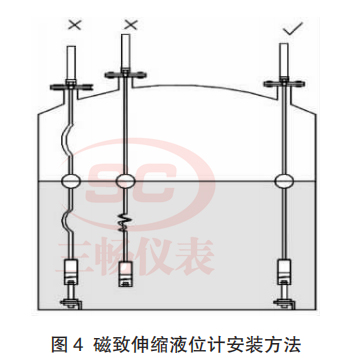
����̎��������HART�ӿڔ�(sh��)��(j��)����̖̎��������ˑB(t��i)�������ʹ�����s������������ͨ�^�}�_���պ��}�_�l(f��)����������������������̖̎����������ڴ�����s��������ԭ������˲�����ͬ��̖̎��ϵ�y(t��ng)��ɳ�����̖̎�����o����̖ͨ���x���_�P���OӋ���Ԍ��F(xi��n)�֕r���ã���̖�Ķ�ͨ��̎�������ɡ������OӋ�ĺܸ߾��ȴ�����sҺλӋ�܉�C�ϑ��ÜضȂ��������ˑB(t��i)��������������sҺλӋ���o�Թ��ݱ���ԃ�����ɜʴ_�y���Ƅ�ʽ���w�Ĺ��ݡ��x���������̎���������������ݔ����(sh��)��(j��)�����w�x��ARM11ϵ�У��OӋ�ɱ����_�l(f��)�y�ȿ��ɴ��½���ͬ�r���ڈD4���D5��ʾ�����M�д�����sҺλӋ�İ��b�̶�[3]��
�����OӋ�ĺܸ߾��ȴ�����sҺλӋ��Ҫ�߂����������c��
���£����ڲ����ۏ��Ĵ�����s̽�y�U�������z�p�Ď������`�����½����}�܉���ЧҎ(gu��)�ܣ�
�ڶ����ڽ�ж�ͭh(hu��n)��(ji��)�����ڂ�����ԭ����ж�ܿ��O�ã���Ʒ���Ӊ����������ēp�Ć��}��ЧҎ(gu��)�ܣ��y�����Ȳ����ܵ�Ӱ푣�
�����������c�����ڲ������F(xi��n)��ײ�����ڻ���`��ĸ����ݼy�����m�w���_�ݼy���c�������ι��B�ӡ����ִ�ֱ��̽�^���x�������܉���ðl(f��)�]�����w��D3��ʾ��
���ģ�ͨ�^�ӵ�̎���ͽ��|���õ�ͨ�ž�·���ӵ���˨�ϵ����B���pо�p�g������|�͵ؾ����Όӣ��ڷ������������O�ýӵ���˨������ӵض����c���w�Ľӵ��c���B�ӣ�
���壬�x�õĴ�����sҺλӋ��PVDFܛ�|���|���܉�õ��^��ʴ_���@ʾ��(sh��)��(j��)��������ͨ����̖���B�ӷ�(w��n)����Ҳ�^�ߡ����⣬�D3��ʾ�ĵײ���λ���N�̶�ͨ�^�i�o�h(hu��n)���F(xi��n)��
2 �ܸ߾��ȴ�����sҺλӋ�Č��F(xi��n)
2.1 ���w·��
ͨ�^�η�Ӌ��_����Ʒ�w�e�c��Һλ�ēQ���Pϵ���� �ڲ�ƽ���Ĺ�܇ͣ��λ�ÿ��]��Һλ�ܵ��ăAб�Ƕ�Ӱ�Ҳ��
Ҫ�õ���ҕ����Y���ˑB(t��i)�������ṩ�����S����������Ϣ�M�� �B�ӡ��麆��Ӌ�㣬�_չ���S����������Ϣ�c���w�Aб�Ĕ�(sh��)�W ��ģ��ͨ�^Ԫ�������o׃��λ�r����߶��c�E�A�ι��w���� �Ķ��e��ģ�ͣ��Y�ϵ�Ч��(sh��)�W˼�룬��Ч�Aб�Ƕȿv��׃λ�� �B(t��i)��o׃λ��B(t��i)��Һ�w�ڃAб���Õr���w�e�܉�����@ȡ���y ���ăAб�Ƕ�ͨ�^�ˑB(t��i)������ݔ������������ģ�ͣ����C�ܸ߾��ȴ�����sҺλӋģ�ͷ���Ҫ���� HART �f(xi��)�h�錦��� �ڣ����܇��Ʒ�w�e��(sh��)��(j��)ݔ����ҺλӋ����ݔ����
2.2 ����(ji��)Ҫ�c
�龫queӋ��Һλ����Ҫ�O����que�y������Ť���}�_�r�g���� �w���Õr�g��(sh��)���D�Q����늉����^������̖�քe�� TDC-GP2�� MAX9202���Դ���ɻز���̖�r�g�y�������ڳʼ��N�w����j �ҽ��������Ҳ��Ļز���̖���ز��z���r�g�O������ɲ���֮ �g�^���c���ز��r�g�ɱ��^�l(f��)�䲨�r�g�ó���
��늉����^���ľ��w�����^���У��x���p���^ͨ���f(xi��)����ʽ���O������ V1 ���^늉���ͨ�� A�����ڵ��_ V1 �ęz�y����늉���������̖��оƬ�o����ͨ�� B �ɴ˴��_���Y���O�Þ� 0 �� ͨ�� B ���^늉���ͨ�� B �܉��ڲ���늉��^���c�r���F(xi��n)��̖�z�����r�g��(sh��)���D�Q������ԓ��̖���˕r CPLD �����µ�늉����^ ֵ��ͨ�� A��׃?y��u)���?V1 �� V2���� V2 ��ͨ�� A �z���r��ͨ�� B �P�]��늉����^�����^���c�z�y�ɴ���ɡ�����׃��څ��#�� ���^���c�r늉���#С��Ӌ�r�`���ͬ�r�@ȡ���r�g��que�y�� �܉��ڳ�������Ӌ�͕r�g��(sh��)���D�Q��֧������ɣ����� 50ps�ĵ��ͷֱ��ʡ��r�g��(sh��)���D�Q�����ܵ� START �� STOP ��̖�g Ӌ�r���r�gֵ�@ȡ���ɴ�������O��ӿ��M�Ђ��f��#�K��������̎������
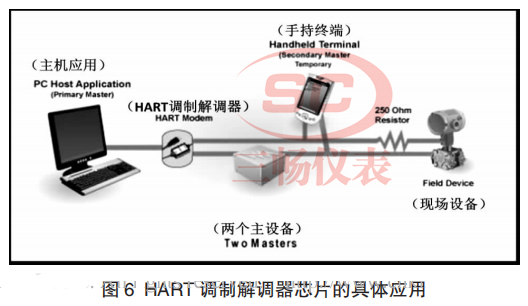

���OӋ���┵(sh��)��(j��)�ӿڵ��^���У��ܸ߾��ȴ�����sҺλӋʹ�õąf(xi��)�h�� HART�����܉�M���܇��Ʒ�w�e��(sh��)��(j��)ݔ���Č����̺ʹ�(sh��)��(j��)����Ҫ��4-20mA ��ҺλӋģ�M��ݔ��Ҳ�܉�ͬ �r�^�ÝM�㡣���┵(sh��)��(j��)�ӿ��OӋ���� DS8500 ��̖��оƬ����HART �{�ƽ��{��оƬ����(sh��) / ģ�D�Q����̖�� AD420��HART �{ �ƽ��{��оƬ���w������D 6 ��ʾ���D 7 �� HART �f(xi��)�h���l�� �I�ع���ʾ��D��HART �f(xi��)�h�����S#����ڃɂ����O�䣬���܉��ڵ������O��ͨӍ���ܸɔ_��ǰ����ʹ�õڶ����O�䣬�ֳ� ͨ���O����ڵ��͵ĵڶ����O�䣬���܉��c�O(ji��n)�y������ϵ�y(t��ng)�ȵ������O��ͬ�r���ã�HART �{�ƽ��{��оƬ��ͨ�^�l���I�� ���F(xi��n)�d���l��׃�����Ƶ��{�ƣ�ͨ�^ 4��20mA ��ģ�M��̖���F(xi��n) ���f�������� ���w�OӋ��Ҫ��ʼ���������ڿ��T����λ����늺��O �ô��ڹ�����ʽ�������ʣ����ڜʂ���� ��B(t��i)����λ�Cshou�Ȱl(f��)��������ƽ���d���z�y���|�l(f��)�Д࣬�����ɴ˕r���ӡ��� �C���������֮�����܉��S֮�_ չ��������Ҳ�܉�ͬ�r�γɣ�#�K���l(f��)�� ���ӣ�SCI ֮���P�]��
�C���������ܸ߾��ȴ�����sҺλӋ�߂��^���ƏV�rֵ���ڴ˻��A�ϣ������漰���OӋĿ�ˡ�Ӳ����ܡ�����(ji��)Ҫ�c�� ��(n��i)�ݣ��tֱ�^չʾ�˺ܸ߾��ȴ�����sҺλӋ�OӋ�͌��F(xi��n)·����������OӋ�� �߾��ȴ�����sҺλӋ���ܸ߾��ȴ�����sҺλӋ��ԭλУ�ʹ����OӋͬ����Ҫ�õ��I(y��)��(n��i)��ʿ�߶���ҕ��












 �Pע�҂� ���F(xi��n)���A
�Pע�҂� ���F(xi��n)���A